Trajectory Tracking via MPC with Softening Constraints
Differential Drive, MPC, Feedforward Control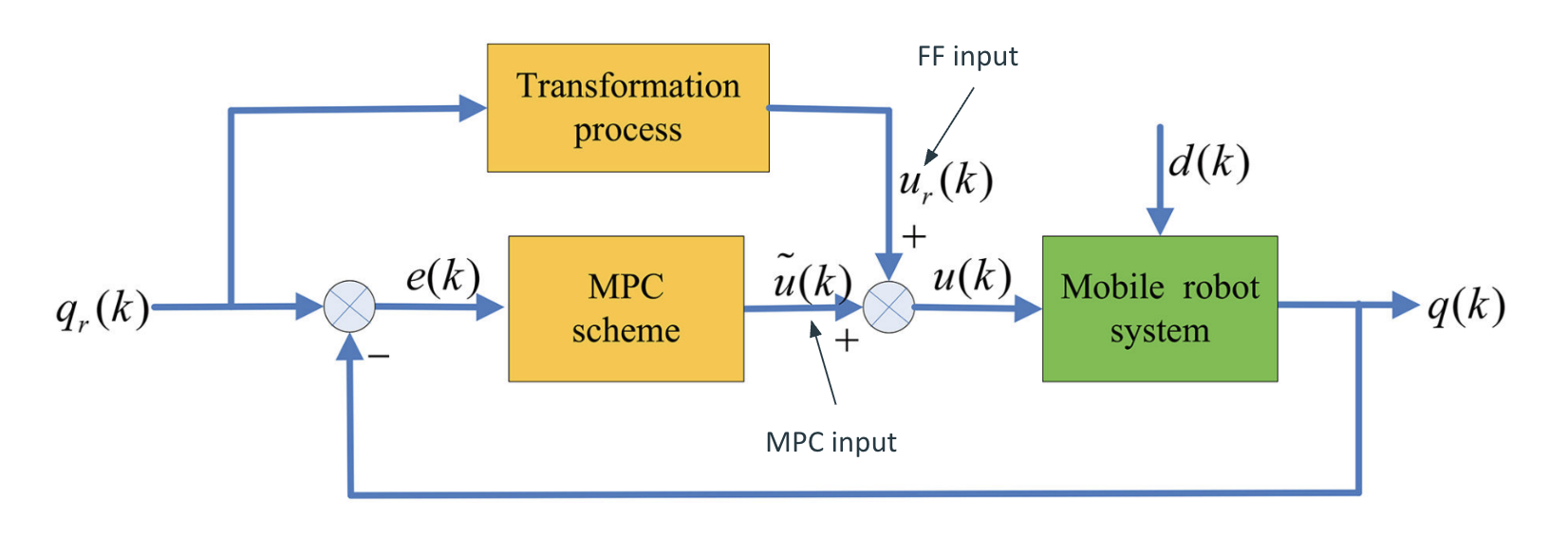

Differential Drive, MPC, Feedforward Control
LQR, Pendulum, Dynamics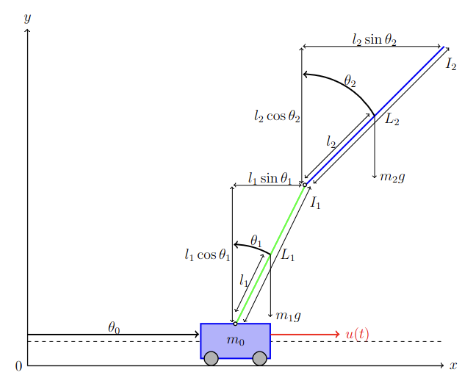
Explore my work in Model Predictive Control, guiding drone with mpc based trajectory planning and obstacle avoidance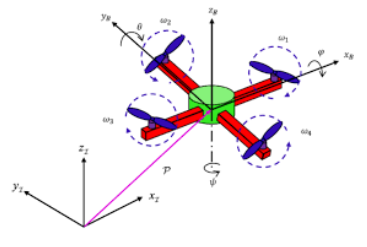
A*, Dynamic Obstacle Avoidance
RAG, LLM, Vector Database, Agent, Tool Use, Systems Connection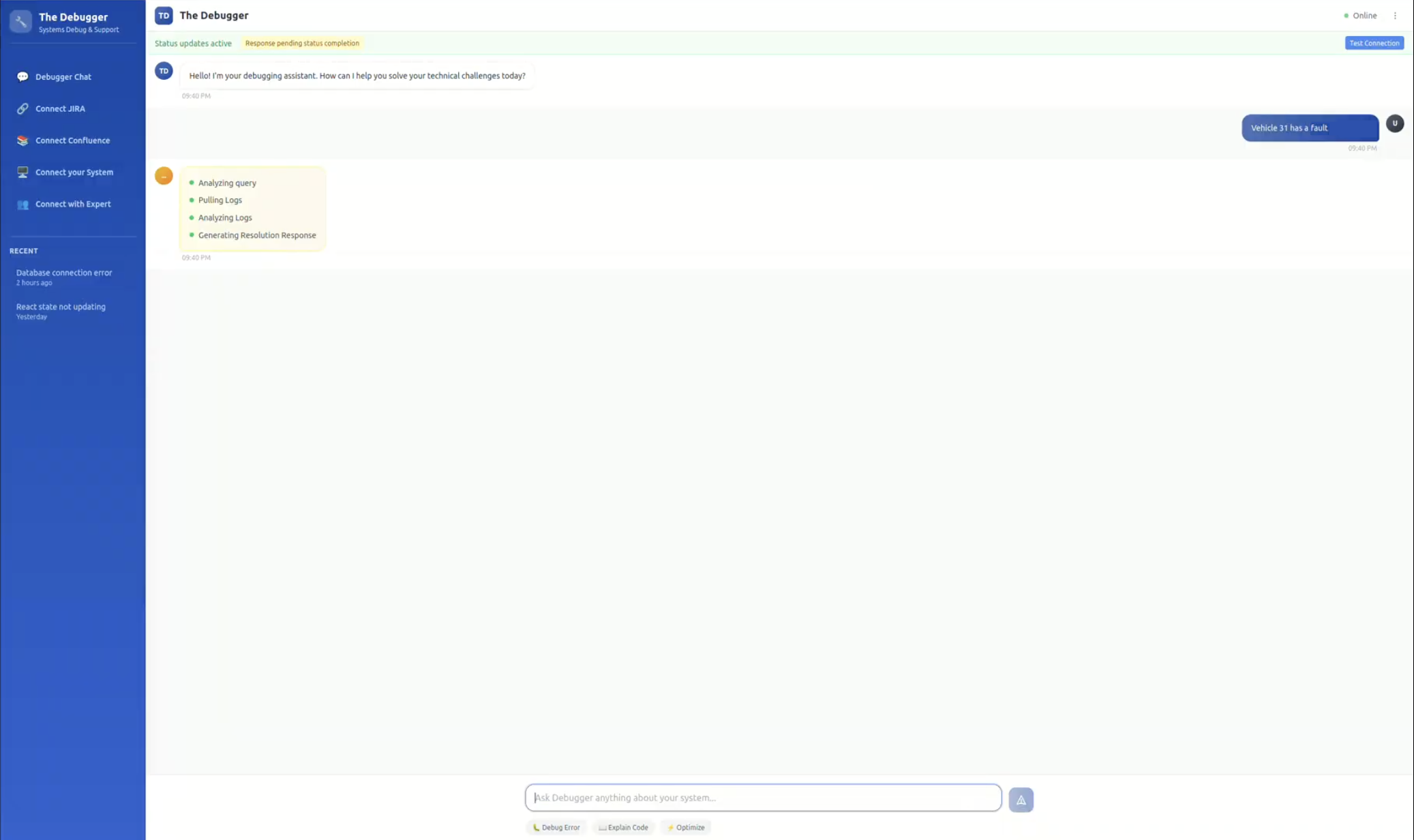
HJR, Path Planning
Using Language based model for loop closure detection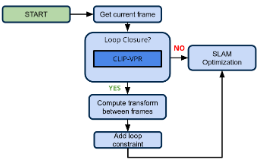
Pytorch, MNIST, CNN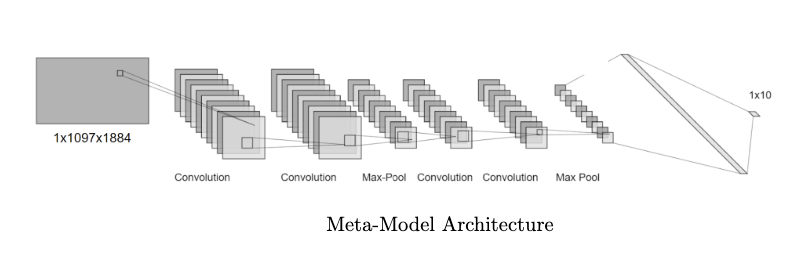
SLAM, Sensor Fusion, Particle Filter, PID
Forward and Inverse Kinematics, Path Planning, Computer Vision, Object Detection
ROS, Computer Vision, PID, Tag Detection
Raspberry-pi camera, supervised learning, Depth
Design, Hardware Interfacing, G-code Generation, Marlin Firmware, Slicing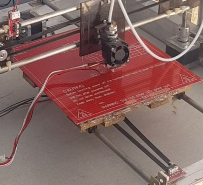
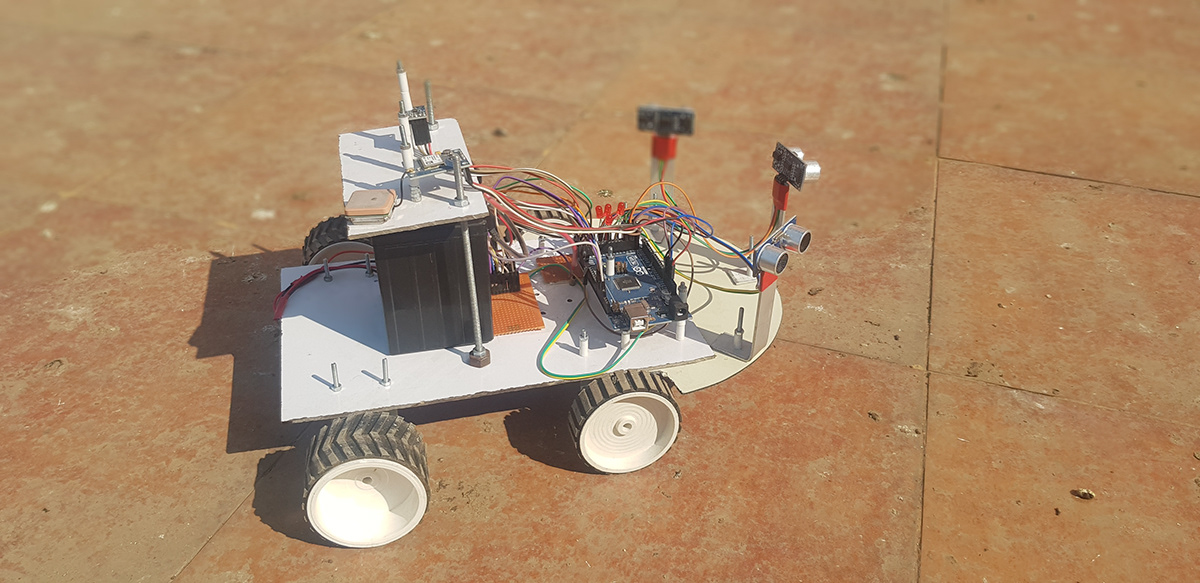
Arduino Mega, GPS Sensor, IMU, Ultrasonic Sensor, Motor Driver