Trajectory Tracking via MPC with Softening Constraints
- This was an implementation of the paper:”Trajectory tracking for wheeled mobile robots via model predictive control with softening constraints by Hongjiu Yang, Mingchao Guo, Yuanqing Xia, Lei Cheng”, to understand the concept of softening constraints.
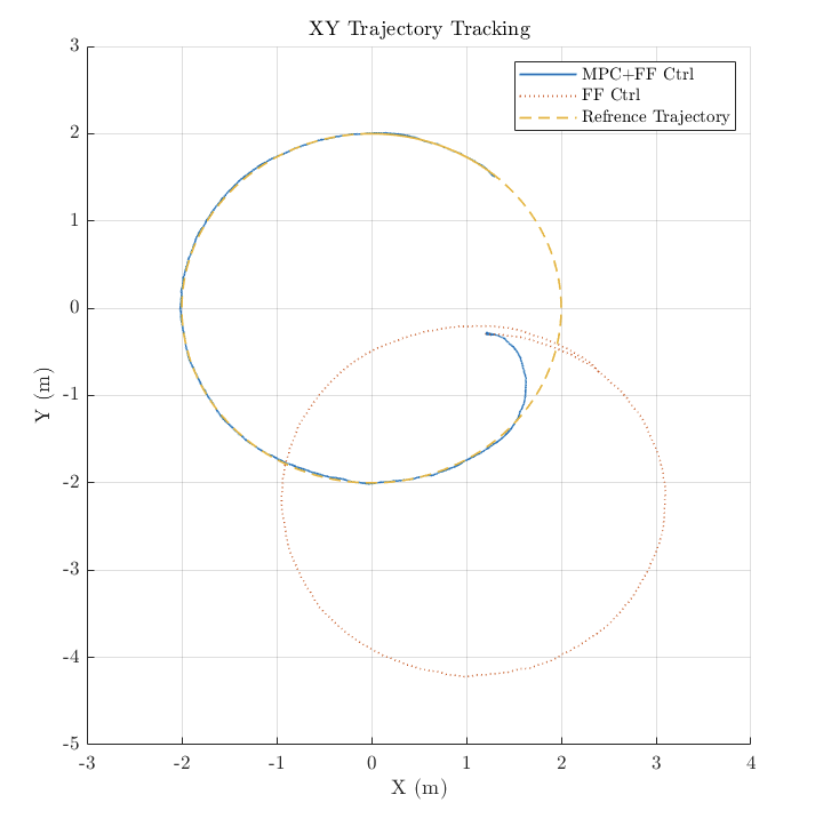
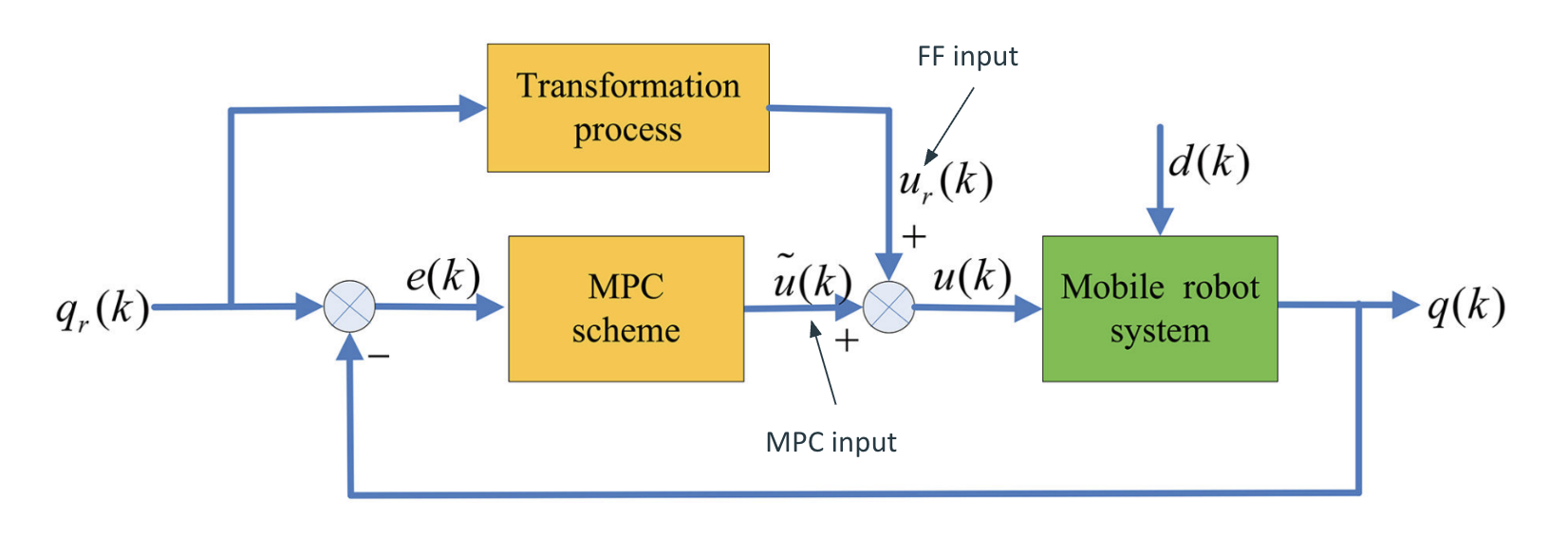
- The feedforward control inputs are calculated from the reference trajectories (assuming the robot is already on the path) while the MPC controller ensures tracking of the reference signal
- FF controller provides the baseline trajectory
- MPC controller ensures tracking
- MPC controller incorporates soft constraints on the control signal and control increment
- Guarantees convergence to a feasible solution for a QP
- Allows for smooth trajectory tracking in presence of external disturbances