iLQR: Swing-Up of Double Inverted Pendulum
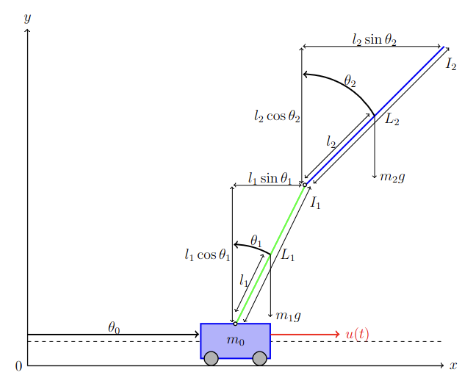
- The double inverted pendulum is a challenging control problem due to its nonlinear dynamics and unstable equilibrium points. In this project, an application of iterative linear quadratic regulator (iLQR) to the swing-up task of a double inverted pendulum system.
- The swing-up task involves raising the pendulum from a stable hanging position to an upright position and then maintaining it there. This is a challenging control problem due to the highly nonlinear and underactuated nature of the system. However, iLQR is a powerful optimization-based control method that can handle such complex systems. The approach involves iteratively solving a sequence of linear quadratic optimal control problems to find a near-optimal control policy for the pendulum system.
- The effectiveness of this approach was tested through simulation experiments, and show that iLQR can successfully swing up and balance the double inverted pendulum.
