- Employed the Interbotix Robotic (6 DOF) Arm to create a pick and place application using a depth camera
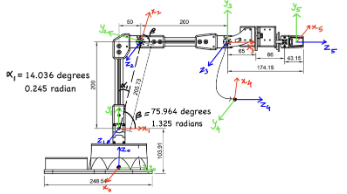
- Computed DH parameters and executed forward and inverse kinematics using Python alongside ROS
- Devised a block detection algorithm by segmenting blocks using computer vision techniques and calculating their coordinates in the real world using camera intrinsic and extrinsic matrices
- Utilized the determined world coordinates to guide the end effector of the robotic arm, enabling it to reach the blocks and perform various operations, such as pick and place, stacking, and more
